Įsikūręs Shangri-La apygardoje, Diqing Tibeto autonominėje prefektūroje, Yunnan provincijoje, 3600–4500 m aukštyje, Kinijos aliuminio Yun Copper vario kasyklos Pulang projektinis gavybos mastas yra 12,5 mln.
2016 m. balandžio mėn. Soly sėkmingai laimėjo transporto be vairuotojo sistemos projekto konkursą pirmajam kasybos ir perdirbimo projekto etapui Yunnan Pulang vario kasykloje.Projektas apima EPC „iki rakto“ sutartį dėl 3660 vikšrinio transporto horizontalių elektrinių lokomotyvų, rūdos vagonų, iškrovimo stočių ir pagalbinių pavaros blokų, elektros, automatikos, bėgių klojimo ir montavimo projektavimo, pirkimo ir statybos.
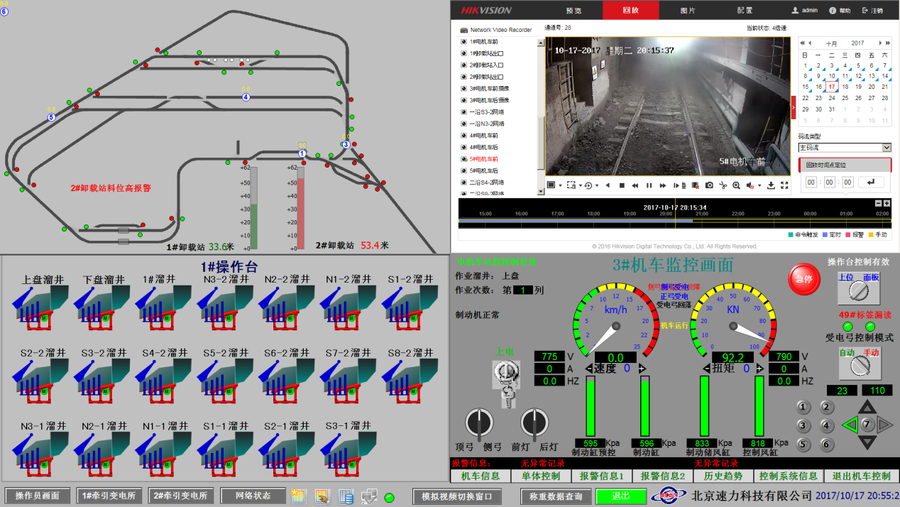
„Pulang Copper Mine“ požeminė geležinkelių transporto automatinė valdymo sistema valdo visą proceso srautą nuo duomenų rinkimo kanalo šachtoje, rūdos pakrovimo vibraciniais iškrovikliais, automatinio pagrindinės transporto juostos veikimo iki rūdos iškrovimo iškrovimo stotyje ir yra susieta. smulkinti ir kelti.Sistema sujungia ir sujungia duomenis iš susijusių sistemų, įskaitant gniuždymą ir kėlimą, ir galiausiai sujungia kelias darbo vietas prieš dispečerį, suteikdama dispečeriui išsamų požeminės gamybos vaizdą, kad būtų galima centralizuoti gamybos planus.Tuo pačiu metu sistema vadovaujasi stabilios rūdos rūšies principu, o pagal rūdos kiekį ir rūšį kasybos srities kanale, išmanų rūdos paskirstymą ir išsiuntimą, sistema automatiškai priskiria traukinius prie iš anksto nustatyto kasybos rajono latako pakrovimui.Lokomotyvas automatiškai važiuoja į iškrovimo stotį, kad užbaigtų iškrovimą pagal sistemos instrukcijas, o tada pagal sistemos instrukcijas važiuoja į paskirtą pakrovimo lataką kitam ciklui.Automatinio lokomotyvo veikimo metu sistemos darbo vieta realiu laiku rodo lokomotyvo važiavimo padėtį ir stebėjimo duomenis, o sistema gali išvesti pritaikytas ataskaitas pagal vartotojo poreikius.
Sistemos funkcijos
Protinga rūdos proporcija.
Autonominis elektrinio lokomotyvo darbas.
Nuotolinis minų krovimas.
Tiksli automobilio vieta realiuoju laiku
Automatinis bėgių kelio signalizacijos sistemų valdymas.
Motorinių transporto priemonių apsauga nuo susidūrimo.
Automobilio kėbulo apsauga nuo gedimų.
Istorinės motorinių transporto priemonių trasos informacijos atkūrimas.
Motorinių transporto priemonių eismo realiuoju laiku rodymas išmanioje platformoje.
Operatyvinių duomenų registravimas, ataskaitų kūrimas pagal užsakymą.
Šis projektas sėkmingai atvėrė naują Soly produktų kūrimo, taikymo ir rinkodaros režimo erą, kuri turi toli siekiančią strateginę reikšmę tolimesnei įmonės verslo plėtrai;Ateityje Soly ir toliau imsis „pažangių kasyklų kūrimo“ savo atsakomybės ir nenuilstamai dirbs kurdama „tarptautiniu mastu pažangias, vietines pirmos klasės“ kasyklas.