Nepilotuojama bėgių gabenimo sistema požeminėms kasykloms

Sistemos funkcijos
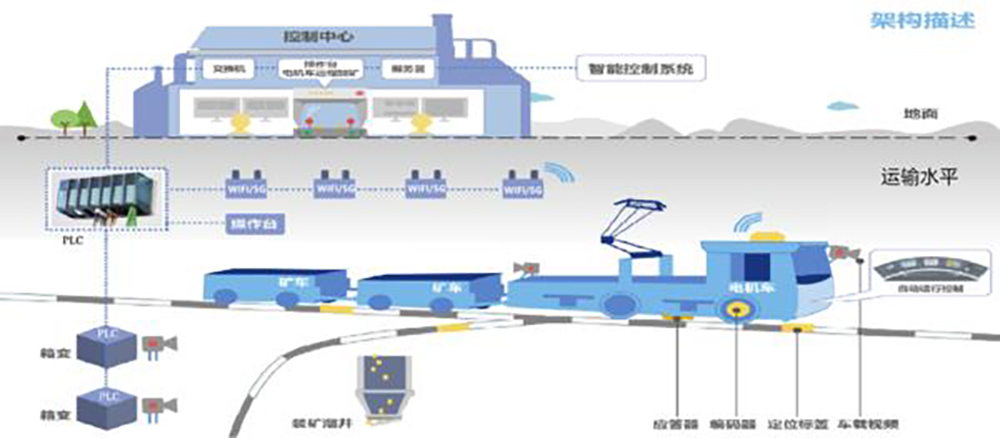
Bevairio elektrinio lokomotyvo sistema susideda iš automatinio veikimo (ATO) valdymo sistemos, PLC valdymo bloko, tikslaus padėties nustatymo įrenginio, išmaniojo dozavimo bloko, belaidžio ryšio tinklo bloko, jungiklio signalo centralizuoto uždarymo valdymo bloko, vaizdo stebėjimo ir vaizdo AI. sistema ir valdymo centras.
Trumpas funkcijos aprašymas
Visiškai automatinis kreiserinis veikimas:pagal fiksuoto greičio kreiserinio judėjimo teoriją, atsižvelgiant į faktinę situaciją ir reikalavimus kiekviename transporto lygio taške, transporto priemonės kreiserinis modelis yra sukonstruotas taip, kad būtų galima realizuoti autonominį lokomotyvo važiavimo greičio reguliavimą.
Tiksli padėties nustatymo sistema:tikslus lokomotyvo padėties nustatymas pasiekiamas ryšių technologijomis ir švyturių atpažinimo technologijomis ir kt., su automatiniu lanko pakėlimu ir autonominiu greičio reguliavimu.
Protingas siuntimas:Surinkus tokius duomenis kaip medžiagos lygis ir kiekvieno latako klasė, o vėliau pagal kiekvieno lokomotyvo padėtį ir veikimo būseną realiuoju laiku, lokomotyvas automatiškai priskiriamas darbui.
Nuotolinis rankinis įkėlimas:Nuotolinis rankinis pakrovimas paviršiuje gali būti atliekamas valdant krovimo įrangą.(Pasirenkama visiškai automatinė pakrovimo sistema)
Kliūčių aptikimas ir saugos apsauga:Pridėjus didelio tikslumo radaro įtaisą prieš transporto priemonę, kad būtų galima aptikti žmones, transporto priemones ir krintančius akmenis priešais transporto priemonę ir užtikrinti saugų atstumą iki transporto priemonės, transporto priemonė savarankiškai atlieka daugybę operacijų, pvz. garsinis signalas ir stabdymas.
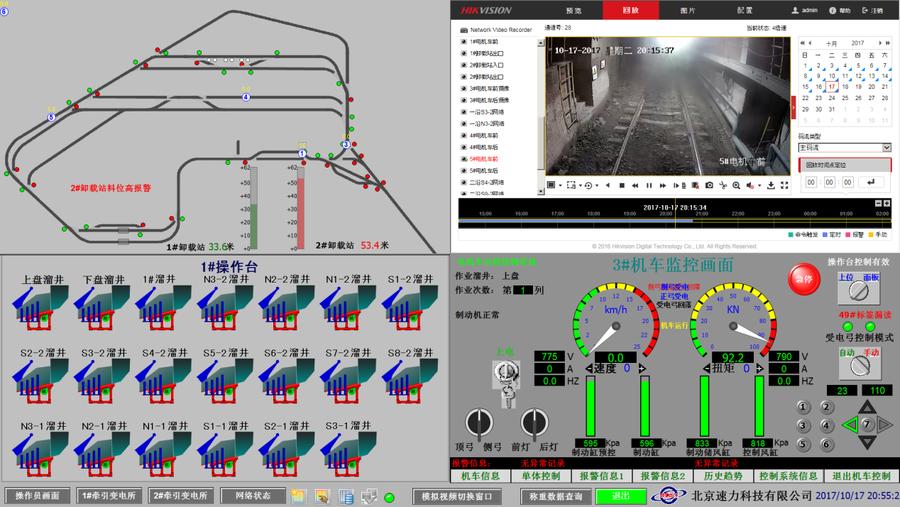
Gamybos statistikos funkcija:Sistema automatiškai atlieka statistinę lokomotyvo važiavimo parametrų, važiavimo trajektorijų, komandų žurnalų ir gamybos užbaigimo analizę, kad sudarytų gamybos eigos ataskaitas.
Sistemos akcentai.
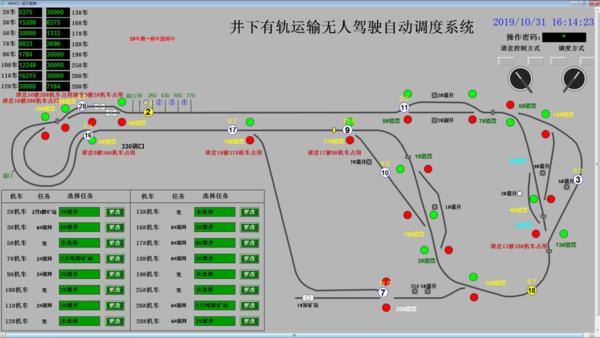
Automatinis požeminių geležinkelių transporto sistemų veikimas.
Naujas be vairuotojo požeminio pasirenkamojo lokomotyvo veikimo būdas.
Tinklinio, skaitmeninio ir vizualinio požeminio geležinkelių transporto sistemų valdymo realizavimas.

Sistemos efektyvumo naudos analizė
Be priežiūros po žeme, optimizuojant gamybos modelius.
Racionalizuoti dirbančių žmonių skaičių ir mažinti darbo sąnaudas.
Darbo aplinkos gerinimas ir vidinės saugos didinimas.
Sumanūs veikimo mechanizmai pokyčiams valdyti.
Ekonominė nauda.
-Efektyvumas:padidino našumą naudojant vieną lokomotyvą.
Stabili gamyba per protingą rūdos paskirstymą.
- Personalas:lokomotyvo mašinistas ir minų paleidimo operatorius viename.
Vienas darbuotojas gali valdyti kelis lokomotyvus.
Kasyklos iškrovimo vietoje dirbančių darbuotojų skaičiaus mažinimas.
- Įranga:sumažinti žmogaus įsikišimo į įrangą išlaidas.
Valdymo pranašumai.
Įrangos duomenų analizė, leidžianti atlikti išankstinį įrangos aptarnavimą ir sumažinti įrangos valdymo išlaidas.
Tobulinti gamybos modelius, optimizuoti personalą ir sumažinti personalo valdymo išlaidas.





